





Robotizacija u poljoprivredi sve više preuzima zasluge za uspješnu i brzu biljnu proizvodnju. Glavni aduti primjene robota u poljoprivredi su svakako brzina izvođenja određenih radnih operacija i ušteda na ljudskoj radnoj snazi. Međutim, u posljednje vrijeme u robotici se velika pozornost pridodaje preciznosti koju se postiže primjenom senzorike.
Roboti u poljoprivredi više nisu samo radna snaga bez „krvi i mesa“. Postali roboti s umjetnom inteligencijom koja uz korištenje suvremenih senzora može u poljoprivredi sa 100 % točnosti osigurati ubiranje određenog ploda u optimalnoj fazi berbe.
Autonomno rješenje za preciznu zaštitu – Jacto
Brazilski proizvođač Jacto u preciznu poljoprivredu uveo je novi autonomni robot Arbus 4000 JAV za preciznu zaštitu trajnih nasada. Robot koristi tehnologiju precizne zaštite koja ima veliku autonomiju rada zbog obujma spremnika od 4.000 litara. Kako bi se izradila optimizirana analiza okoliša, robot posjeduje sustav skeniranja, zatim aplikacijski sustav s multiventilatorima s neovisnim električnim pogonom pomoću kojih se neovisno kontrolira protok zraka prema veličini postrojenja uz bolju energetsku učinkovitost, čime se smanjuje potrošnja goriva. Robot obavlja inteligentnu primjenu koja je proporcionalna veličini analizirane biljke, što omogućuje veću uštedu kemijskih sredstava.
Robot posjeduje tzv. automatsko rezanje presjeka pomoću kojeg analizira ima li zelene mase. Aplicira samo po ciljanome području što se dodatno postiže ušteda kemijskih sredstava. Robot posjeduje 132 cv dizelski motor te neovisan sustav ovjesa. On omogućuje rad s većim brzinama i veću izdržljivost okvira samoga robota.
Sustav neovisnog upravljanja s UNITRACK tehnologijom; omogućuje rad s malim radijusom okretanja za rad na kraju prohoda s većom kvalitetom maneviranja te ujedno i veća produktivnost opreme. Inteligentni 4×4 hidrostatski prijenosni sustav s neovisnom kontrolom trakcije kotača i integriranim dizelskim motorom omogućuje optimizaciju korištenja snage; smanjenje potrošnje goriva i maksimiziranje snage vuče s tla dok je kompaktan dizajn osmišljen bez površina koje dopuštaju oštećenje plodova i dijelova biljke. Robot posjeduje autonomnu kontrolu rada gdje se interaktivno upravljanje vozilom putem konzole može izvoditi u ruci voditelja operatera.
Na taj način se omogućuje rad s više od jednog vozila u isto vrijeme s funkcijom „vlaka“ i virtualnim usklađivanjem strojeva. Funkcija „vlaka“ omogućuje da se slijedi jednog robota koji predstavlja „vođu“ te su na taj način strojevi gotovo međusobno povezani. Opisana funkcija omogućuje individualnu konfiguraciju zadataka za svako vozilo. Prilikom nailaska na prepreku uključuje se inteligentno upravljanje kontrolom prepreka. Vozilo se automatski zaustavlja kad identificira prepreku i upravitelj vozila može odlučiti o relevantnim radnjama (daljinsko praćenje rada).


Autonomno traženje i suzbijanje korova – Solix
Jedan od iznimno eksplolatacijski učinkovitih robota za suzbijanje korova je robot pod imenom Solix. Proizvođač navodi kako robot Solix može pokriti do 100 jutara (40,5 hektara) poljoprivrednog zemljišta dnevno. Ideja proizvođača je potekla od pitanja ako su kemijska sredstva financijski sve skuplja, zašto ne aplicirati zaštitna sredstva samo na područjima na kojima raste korov. Robot Solix je dizajnirala brazilsko-američka poljoprivredno tehnološka tvrtka Solinftec. Princip rada je pregledavanje usjeva i izvještavanje poljoprivrednika o njima.
Robot je pogonjen elektičnom energijom koja se akumulira koristeći četiri ugrađena solarna panela. Prilikom kretanja robota preko usjeva, upotrebljava skup integriranih senzora za skeniranje svake biljke preko koje prijeđe “od korijena do lista”. Ako ugrađeni sustav Alice AI utvrdi da je biljka korov, na nju se selektivno primjenjuje herbicid. Robot također pokazuje digitalnu kartu polja, pokazujući gdje je korov otkriven i tretiran pomoću čega poljoprivrednik dobiva digitalnu kartu zaštite kao bitan podatak preciznoj poljoprivredi. Dodatno, korištenjem sustava rasvjete i baterije koju pune solarni paneli, prskalica može raditi 24 sata dnevno.
Velika prednost robota je u masi. Robot je puno lakši od traktora koji mora vući “pametnu” prskalicu za uočavanje korova. Ovdje je kod robota pri apliciranju zbijanje tla svedeno na minimum. Robot Solix je optimiziran za korištenje na usjevima žitarica kao što su pšenica, soja i kukuruz. Proizvođač Solinftec tvrdi da je u dosad provedenim američkim ispitivanjima ova tehnologija uspjela smanjiti upotrebu herbicida do 70 %.


Robotsko oprašivanje – spas ili loša zamjena?
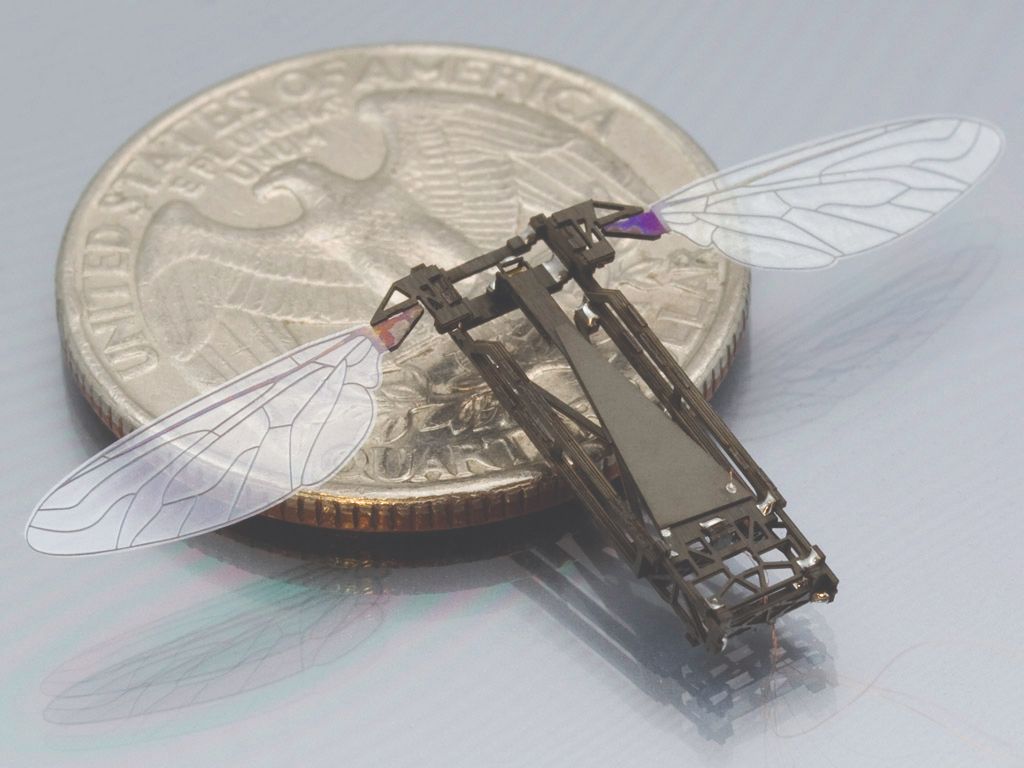
Još godine 2013. Sveučilište Harvard predstavilo je svoga robota pod nazivom RoboBee, točnije riječ je o letećem robotu koji ima dimenzije kovanice te veliku prednost nad ostalim robotima tj. mogućnost prijelaza iz vode u zrak. To je podvig izvan područja stvarnih kukaca. Odlike navedenog robota su modularni dizajn jednostavan za izradu. Zatim opremljenost bio-inspiriranim aktuatorima, senzorima i mehanizmima za kontrolu leta, širina 3 cm, masa oko 0.00005 kg s mogućnošću brzine leta od 3.6 km/h.
Robot je opremljen žiroskopima, optičkim senzorima protoka, senzorima ocelli (senzori za otkrivanje horizonta inspirirani kukcima) s 3-5 stupnjeva slobode kretanja. Nedavno je grupa na Sveučilištu Delft u Nizozemskoj otkrila robota-drona pod nazivom DelFly. Riječ je o malom robotu dronu s profinjenim motoričkim vještinama – točnije sposobnost mahanja krila u iznosu od 17 puta u sekundi kako bi se ostvarilo kontrolirano kretanje. DelFly je najnoviji i najagilniji dizajn robota-drona. On može lebdjeti ili letjeti u bilo kojem smjeru (gore, dolje, naprijed, natrag ili bočno).

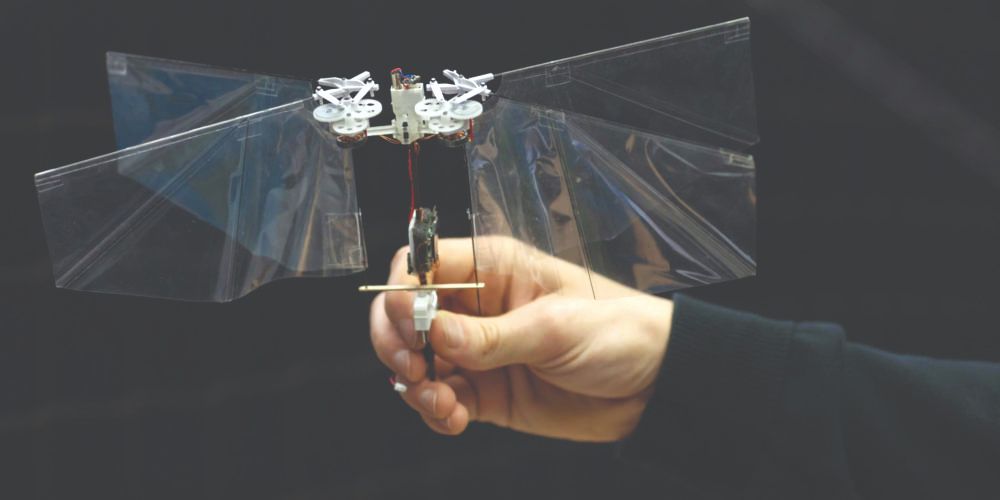
Za razliku od svojih prethodnika, kojima se upravlja kao i konvencionalnim avionom preko otklona kontrolnih površina smještenih na repu ili iza krila, DelFly nema rep niti takve kontrolne površine. Umjesto toga, njime se upravlja pomoću prilagodbi kretnji dvaju para krila koja mašu inspiriranim kukcima. Nedostatak repa čini DelFly Nimle manje osjetljivim na oštećenja i vrlo okretnim, omogućujući rad i na otvorenom pri slabom vjetru. Dok lebdi, robot mase 29 g i raspona krila od 33 cm može letjeti više od 5 minuta s potpuno napunjenom baterijom, dok njegova krila od 14 cm mašu frekvencijom od približno 17 Hz.
Njegova izvanredna energetska učinkovitost dostiže vrhunac pri krstarećoj brzini od približno 3 m/s (~11 km/h). Ona omogućuje domet leta veći od 1 kilometra. Robot ima omjer potiska i težine veći od 1,3. Sposoban je nositi dodatni teret do 4 grama (npr. sustav kamera s video prijenosom uživo, dodatni senzori itd.). Iznimna agilnost može se demonstrirati preokretima od 360 stupnjeva oko osi nagiba ili okretanja ili brzim prijelazima iz lebdenja u let naprijed ili u stranu, i obrnuto.
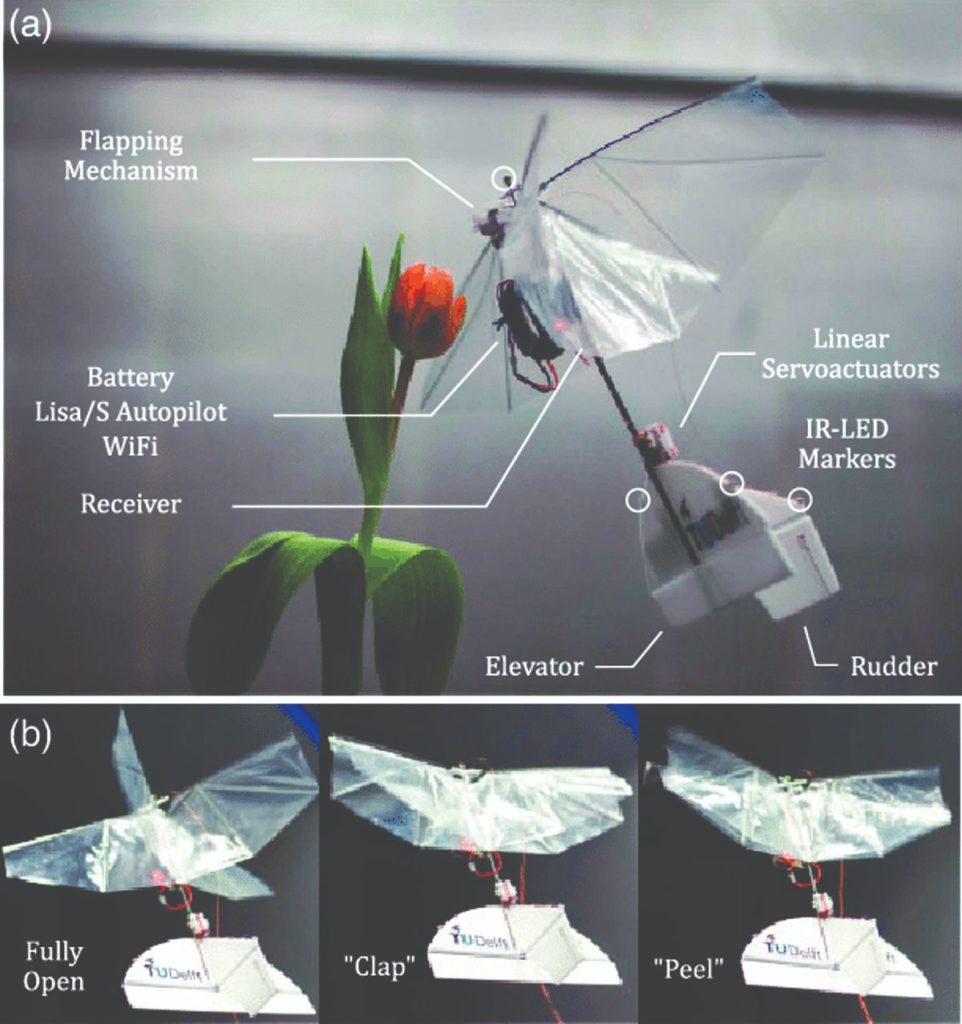
Pri punoj brzini leta robot postiže najveću brzinu od 7 m/s (~25 km/h). Kao kod helikoptera, ali i kao kod kukaca, let naprijed/natrag i bočno se postiže naginjanjem i kotrljanjem tijela robota u odgovarajućem smjeru. Da bi kontrolirao orijentaciju tijela, robot treba biti u stanju proizvesti momente oko tri ortogonalne osi tijela. U tu svrhu, robot je opremljen s dva neovisna mehanizma za zamahivanje, po jedan za svaki par krila sa strane robota.
Oni su dopunjeni s dva rotacijska servo aktuatora. Od toga jedan prilagođava diedarski kut promjenom relativne orijentacije dvaju mehanizama zamahivanja, a drugi pokreće vrhove lijevog i desnog korijena para krila. Kotrljanje se postiže pokretanjem dva para krila na različitim frekvencijama mahanja. To rezultira razlikom potiska koja stvara okretni moment oko osi kotrljanja. Moment nagiba se proizvodi prilagođavanjem diedralskog kuta koji pomiče vektore prosječnog potiska otkucaja krila dva para krila naprijed ili nazad, u odnosu na središte mase.
Naposljetku, skretanje se postiže pokretanjem korijena lijevog i desnog para krila. Tako su njihove odgovarajuće sile potiska od otkucaja krila nagnute u suprotnim smjerovima, stvarajući okretni moment oko osi skretanja. Zbog nedostatka repa, koji je osiguravao pasivnu stabilnost u prijašnjim dizajnima, robot se oslanja na aktivnu stabilizaciju, koju omogućuju ugrađeni autopilot i softver.
Nizozemsko sveučilište je mišljenja kako će u skoroj budućnosti biti dostupna tehnologija kojom će se dronovi učiniti mnogo manjim i mogli bi svoju primjenu imati u staklenicima. Jedan od suvremenih dizajna drona za oprašivanje pod nazivom PlanBee dolazi od američke dizajnerice Anne Haldewang. Ona je osmislila robot-dron koji pokušava manje oponašati funkciju pčela, ali zadržati njihov izgled i veličinu. Kretanje robot-drona se obavlja uz pomoć propelera, dok se raspoznavanje cvijeća uspostavlja korištenjem kamere. Robot-dron PlanBee će moći oprašivati kulture tijekom niskih temperatura, vjetrovitih uvjeta i noću kada pčele nisu aktivne. To povećava učinkovitost robota.
Još jedan od novih robot-dronova pod nazivom Dropcopter dolazi iz New Yorka. Dropcopter je veliki dron koji leti oko 10 stopa iznad voćnjaka, ispuštajući ravnomjeran sloj peludi. Tvrtka koja stoji iza njega tvrdi da je već dokazano da se upotrebom robot-drona povećavaju prinosi usjeva za 25-50 %. Spremnik za oprašivanje ima sposobnost nositi i raširiti do 5 kg peludi. Sustav je dizajniran za prijenos i korištenje manje peludi u većoj koncentraciji nego što ventilatori mogu raspršiti. Mješavina peludi je sastavljena od 98 % peludi i 2 % aktivnog ugljena.


Tulipani imaju svog robota – H2L robotics
Za potrebe cvjećarstva, točnije prilikom ubiranja tulipana potroši se jako veliki broj sati rada radnika. Kako bi se povećala učinkovitost i smanjili rizici pri angažiranju radnika, nizozemska tvrtka H2L robotics je napravila robota za pod nazivom Selector180.

Robot za odabir tulipana autonomno se kreće preko parcele uz pomoć korištenja satelitskog GPS siganala uz RTK točnost. Postavljene kamere skeniraju tulipane tijekom vožnje. Nakon toga sustav umjetne inteligencije – AI (Artificial Intelligence) odnosno mreža analizira slike radi otkrivanja bolesti. Robot za obradu zatim provodi tretman na oštrici. Glavne odlike robota su: širina radnog zahvata u iznosu od 180 cm, detekcija virusa na relevantnim kultivarima, mogućnost AI učenja novih kultura u roku od 48 sati, autonomna vožnja uz korištenje GPS-RTK signala, brzina od 2 hektara za 12 sati, pogon putem korištenja kemijskog goriva (benzin) i to putem gusjeničara kako bi se smanjila zbijenost tla.
Robot u vinogradu – VitiBot
VitiBot je francuska industrijska tvrtka autonomnih i električnih vinogradarskih robota. Tvrtka prati vinogradare u oplemenjivanju njihovih vinograda najnovijim tehnološkim rješenjima. VitiBot spaja suvremene ekološke i ekonomske probleme nudeći pri tome rješenje bez korištenja rukovatelja. VitiBot je za potrebe održavanja vinograda napravio robota pod nazivom Bakus. Robot Bakus se može opremiti nizom električnih i pasivnih alata koji se mogu u potpunosti modulirati na stupu držača alata. VitiBot je razvio niz električnih alata koji omogućuju precizno prilagođavanje rada u vinogradu i očuvanje trsova i mladica na najbolji mogući način.
Moguće je kombinirati do 2 alata po strani i istovremeno. Robot Bakus dolazi sa električnim alatima od koji se mogu nabrojat: električni rezač korova, kosilica, disk za podrezivanje korova, rovilo. Od pasivnih alata se mogu nabrojati: metalni rotirajući prsti za uništavanje korova, mala rovila i prskalica. Robot Bakus ima masu od 2400 kg te se zbog svoje veće mase kreće putem pneumatika Michelin Multibib 320/65 R16 na kojima je postavljen nizak pritisak 0,9 bara za smanjenje utjecaja zbijanja tla. Robot je u potpunosti električni te se navigira putem GPS-RTK navigacije.






{kind=link}