





U broju 15 od 15. kolovoza pisali smo o načinima rada robota za sjetvu, o Mars robotima koji rade u rojevima te o raznim prednostima robota. Troše 70 % manje energije za obavljanje istog posla te u skladu s tim i imaju manju potrošnju CO2. Slijedi nastavak.
Poljoprivredni roboti su hardverski strojevi s otvorenim kodom i dizajnirani su za sposobnost reprodukcije i dostupnost komponenata. Mogu se stvoriti pomoću uobičajenih alata i procesa. To znači da se ne oslanjaju na jednog dobavljača. Strojevi koriste linearne vodilice u osi X, Y i Z, uključujući portalni most i prilagođene ravne spojne ploče koje se mogu izraditi s brojnim alatima. Za rad robota i njegovu komunikaciju s navigacijskim sustavom, važni su motori, mikrokontroleri, kamere i senzori. Ostali alati tiskani su 3D i dizajnirani su za izradu pomoću 3D printera.
Softverski dio robota
Poljoprivredni roboti kontroliraju se putem web sučelja koje omogućuje daljinski pristup s bilo kojeg mjesta na većini uređaja s omogućenom internetom. Koriste internetsku bazu podataka o usjevima pod nazivom OpenFarm za stvaranje optimalnog plana sadnje na temelju veličine usjeva. Preciznost stroja čini ga prikladnim za laboratorijske uvjete.
Web aplikacija ima mogućnost prilagodbe različitih unosa, uključujući vodu, gnojivo i pesticide, razmak sjemena i čimbenike okoliša, uključujući tlo i vremenske uvjete, na temelju očitavanja senzora, mjesta i doba godine. Također je u mogućnosti graditi i planirati sekvence kombiniranjem i izmjenom osnovnih operacija. Softver je također u mogućnosti manipulirati mapama podataka, evidentirati u stvarnom vremenu i pristupiti otvorenim podacima o pogonu u bazi podataka OpenFarm. Aplikaciju je moguće koristiti na različitim uređajima, od računala, laptopa, do mobitela i tableta.
Precizna poljoprivredna navigacija omogućuje poljoprivrednicima povećanje produktivnosti, uz GPS i postoje mnogobrojni senzori, monitori i kontrola za upravljanje opremom. Svi zajedno omogućuju agronomima precizno praćenje aktivnosti te analize podataka (temperatura, vlaga). Dronovi su malene letjelice koje prolaze preko polja te snimaju sliku koja pomaže agronomu da dođe do saznanja o mogućim biljnim bolestima, štetnicima i slično. Dron omogućava sakupljanje više informacija u kratkom vremenskom roku. Softveri za upravljanje poljoprivrednom proizvodnjom imaju važnu ulogu u preciznoj poljoprivrednoj navigaciji.
Korištenje aplikacija agronomima omogućuje jednostavan i brz način praćenja i upisivanja svih aktivnosti na proizvodnim površinama. Ostale mogućnosti su alarmi za nisko stanje zaliha materijala, praćenje vremenske prognoze, detekcija bolesti i štetnika. Senzori tla i usjeva mogu čitati sve potrebne informacije, od zdravstvenog stanja biljke do razine dušika i količine vode u tlu. Senzori omogućuju slanje podataka putem aplikacije koji se dalje obrađuju. Pametna tehnologija u poljoprivredi unaprjeđuje poljoprivrednu proizvodnju, štedi vrijeme i gorivo i smanjuje umor radnika.
Poljoprivredni roboti za praćenje razine oboljenja i nametnika
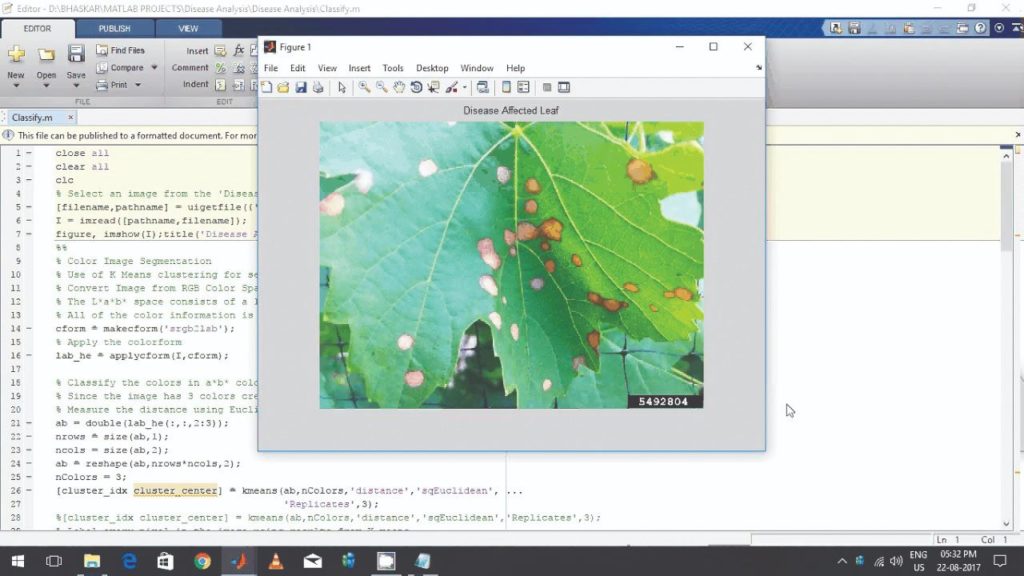
Agrobot je robot za detekciju bolesti lista. Dokazano je da je automatizirana tehnika strojnog vida učinkovita gdje na temelju obrađene slike računalo rezultira otkrivanjem bolesti. Obrada biljke je putem slikovnog prikaza: povezivanje web kamere s računalom koje ima MATLAB softver. MATLAB snima uzorak tla (boja i tekstura tla) te obrađuje podatke kako bi odabrali biljku za koju je analizirano tlo najprikladnije. Otkrivanje bolesti lista putem obrade slike moguće je povezivanjem web kamere s MATLAB softverom čime je omogućeno praćenje promjene teksture i boje lista.
Robot je programiran da se zaustavi ispred biljke te snimi biljku pomoću web kamere. MATLAB obrađuje sliku i otkriva bolest biljke. Ako softver otkrije bolest pokrenut će se apliciranje određenog pesticida na biljku. MATLAB će prikazati očitanja na grafičko korisničkom sučelju. Također sustav će poslati SMS poruku agronomu obavještavajući ga o statusu rasta biljke. Robot posjeduje web kameru koja sliku pohranjuje u realnom vremenu putem računala do računalne mreže. Za razliku od IP kamere za čiju je uspostavu potreban Ethernet ili Wi-Fi.
Robot sadrži temperaturni senzor LM35 koji se koristi za očitavanje temperature. Kad temperatura raste, izlazni napon LM35 se povećava, senzor daje vrijednosti u obliku analognog signala. Signal se šalje na analogno-digitalni pretvarač (ADC) koji ga pretvara u digitalni oblik. Za mjerenje vlage robot koristi analogni senzor koji daje izlaz u obliku analognog signala koji ADC pretvara u digitalni oblik. Senzor daje obavijest o vrijednosti promjene vlage u atmosferi putem aplikacije. U agrobotu RS 232 je serijski komunikacijski kabel koji služi za prijenos uređenih podataka s računala na kontroler za daljnji rad sustava. Machine vision tehnologija i ANN (Artifical Neural Network) sustavi su za automatsko otkrivanje bolesti lista biljke. Zbog segmentiranja područja lista kojeg je zahvatila bolest izračunava se postotak infekcije lista. Slika lista obrađuje se na osnovi boje i teksture nakon čega se identificira bolest kojom je pogođena biljka.
Robot za usisavanje insekata
Razvijena su dva sustava, prvi sustav je uključivao samo usisavanje dok je drugi uz usisavanje sadržavao i sustav za puhanje. Brzina usisavanje iznosila je 9 m/s, a brzina puhanja iznosila je 10 m/s. Kombinacija puhanja i usisavanja iskorištava načelo održavanja brizne puhanog zraka u usporedbi sa samim usisavanjem što rezultira većim silama vuče, samim time i većim brojem kukaca uklonjenih s biljke. U zatvorenim prostorima poput staklenika ograničena je upotreba pesticida, posebno u organskim usjevima. Mnogi insekti razvijaju otpornost na pesticide, što onemogućuje pravilnu borbu protiv istih te na kraju uzrokuju velike štete u proizvodnji. Kao alternativni oblik suzbijanja koriste se navedeni roboti za usisavanje. Robotima je potrebna veća vučna sila ako se radi o uklanjanju ličinki.

Poljoprivredni roboti za suzbijanje korova
Poljoprivredni roboti (agbot; agribot) su strojevi koji obavljaju poslove samostalno, bez neposrednog upravljanja ljudi i smanjuju potrebu za ručnim radom, odnosno ljudskom radnom snagom. Autonomni su u kretanju, a svoju poziciju utvrđuju pomoću GPS RTK (Real Time Kinematic; satelitska navigacija u stvarnom vremenu) i video kamerama prateći redove biljaka.
Osim dronova (bespilotna letjelica) namijenjenih za praćenje stanja i napredovanja usjeva, npr. potrebe za gnojidbom, zaštitom od korova, bolesti i štetočina, topografsko i agrokemijsko kartiranje poljoprivrednih površina, poljoprivredni roboti najzastupljeniji su u fazi žetve/berbe i stočarstvu, ali se sve više razvijaju i za druge zahtjevnije tehnološke operacije, sve češće i za uništavanje korova. Suvremeni roboti za uništavanje korova sve se više oslanjaju na solarnu energiju te su energetski potpuno autonomni, čak i kad je vrijeme oblačno, dok roboti pokretani baterijama dobro rade i noću.
Brzina kretanja agribotova na terenu uglavnom je ispod 6 km/h. Radna brzina prilagođava se brojnosti korova te su naročito učinkoviti kod umjerene i niske populacije korova. Postizanje visokih prinosa, dobre kakvoće i profitabilnost uzgoja, posebice povrća, izrazito ovisi o kontroli populacije korova tijekom kritičnog razdoblja CPWC; Critical Period of Weed Control kako bi se spriječio gubitak prinosa. Osnovni zadatak kontrole korova je ukloniti korove ili ih potisnuti dovoljno dugo da bi usjev stekao konkurentnost-prednost.
Autonomni robotski sustav kontrole korova opće namjene čine četiri tehnologije: navigacija, otkrivanje i identifikacija korova, pozicija korova u usjevu i kartiranje. Dugo vremena je prepreka uspješnom korištenju robota za uništavanje korova bila pouzdanost u otkrivanju i identifikaciji vrste korova u različitim fazama rasta, ali nove generacije računalno upravljanih robota mogu prepoznati i ukloniti korov udaljen svega 1 cm od biljke bez njenog oštećenja, npr. mlade rajčice ili salate. Poljoprivredni roboti opremljeni takvom tehnologijom „strojnog vida“ mnogo su pouzdaniji pa čak i kod brzina rada od 4 km/h ili više.
Hrvatski startup Crop Shepherd, kojeg čine Leon Andrec i Milivoj Bošnjak, razvija robota koji bi se koristio u poljoprivredi za uništavanje korova bez upotrebe herbicida, primarno na ekološkim površinama. Robot se napaja baterijama i solarnim panelom.
-Uglavnom se uspoređujemo s drugim robotima koji se ne temelje na laseru, nego na nekakvim mehaničkim metodama ili ciljano prskaju herbicide tamo gdje je potrebno. Naša je prednost, dakle, da smo potpuno ekološka metoda. Druga prednost je da je naš robot financijski isplativ i za male poljoprivrednike. Svatko tko ima bar jedan hektar zemlje može razmišljati o našem robotu, ističe Andrec.





{kind=link}