





Na Agronomskom fakultetu u Zagrebu početkom rujna, održana je završna konferencija na kojoj su prezentirani rezultati kao i uspješnost provedbe projekta AgriArt na kojem su u posljednje tri godine uspješno surađivali MMM Agramservis d.o.o. i Agronomski fakultet u Zagrebu.
Manjak radnika u poljoprivredi, ali i stručne radne snage ili pak nametnici koji prijete kulturama – sve više će se ovakvi problemi riješavati tehnologijom. Tako bi hrvatska polja uskoro mogli nadzirati roboti roveri. Jedan takav nadzire voćnjak u Velikoj Ludini. Prototip je napravljen u sklopu projekta AgriArt, a sveukupna vrijednost projekta bila je 2 miljuna eura.
Roboti roveri samostalno obilaze poljoprivredna zemljišta
–Živimo u vremenima klimatskih promjena, a štetnici primjerice kajsije koji su bili samo na Mediteranu zbog nepostojanja zime zadnjih 20-30 i više godina pređu u Međimurje i Podravinu. Ovaj nam projekt daje novu mogućnost , da ako neki poljoprivrednik vidi novog štetnika , slika istog se šalje odmah svim kolegama u Europi i Aziji gdje će sigurno netko imati iskustvo te determinirati vrstu i problem i dati rješenje, rekao je prof. dr. sc. Ivica Kisić , dekan Agronomskog fakulteta u Zagrebu.
–Roveri samostalno obilaze poljoprivredna zemljišta i upozoravaju na moguće štete. Prije nego što se može vidjeti golim okom, štetu na jabukama rover je već otkrio. Glavni uzročnici koji čine teškoće unutar voćnjaka su štetnici, a AgriArt je platforma koja prikuplja podatke, cjelovito ih obrađuje i alarmira voćara, poljoprivrednika, koji na svoj mobilni telefon dobiva informaciju što se događa u njegovu voćnjaku, pojašnjava Mario Kožul, voditelj projekta AgriArt iz MMM Agramservisa.



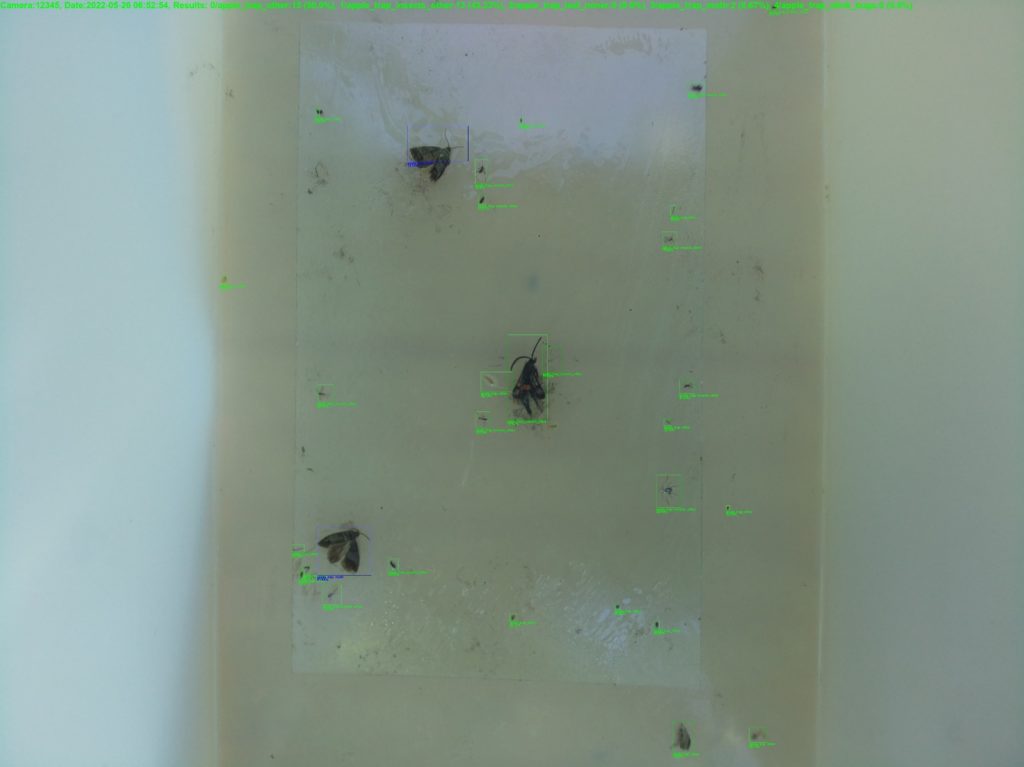
–Rover ,,znaʺ da su stigli štetnici, ali s više od 30 senzora prikuplja i podatke s meteopostaja. U roku odmah – poljoprivrednik zna što prijeti. Sastavnice samog projekta su i lovke koje bilježe i hvataju kukce, a unutra je i kamera koja šalje podatke o povećanoj koncentraciji štetnika na poljoprivrednoj parceli, potrebna informacija se isporučuje poljoprivredniku koji dobiva na svoj mobilni telefon informaciju što se događa u njegovom voćnjaku, kaže Kožul. Robot rover za sada je prototip, nastao u Hrvatskoj, pa još nije zaživio na poljima.

Robot-rover razvijen je kao samostalna samovozeća platforma koja autonomno obilazi zacrtanu poljoprivrednu površinu pri čemu se uzimaju slikovni uzorci i automatizirano se provode analize stanja plodova i vegetacije te omogućuje rano prepoznavanje i alarmiranje različitih agronomskih pojava i štetnika unutar industrijskog voćnjaka. Moguće je da će se roboti roveri jednog dana moći i unajmiti kao redoviti servis jer u samo tjedan dana može proći i skupiti podatke s 15 hektara poljoprivrednog zemljišta.
Tehnologija koja puno znači
Nalazimo se u vremenu kada je sve teže doći do radne snage i stručne radne snage ili zbog toga što nije dostupna ili zbog toga što se gleda na financije da li se to isplati i koliko košta jedan sat rada stručnjaka koji to može utvrditi. Sa ovim tehnologijama kad kamere snimaju ili slikaju što se događa u voćnjaku i javljaju na dnevnoj bazi izvješća gdje se javlja problem i to na onom dijelu na koji tehnolog nije uspio u tom danu proći i vidjeti, zapravo jako puno znači.
–Svjesni smo da se klimatske promjene događaju i da su one tu. Konkretno pratili smo jabučnog savijača koji se inače javlja kao dvije generacije godišnje, zadnjih nekoliko godina već se javlja treća generacija godišnje. Vrijeme kada tehnolog ne bi uopće više očekivao, taj savijač dolazi i radi štetu. Dakle, zbog klimatskih promjena imamo recimo i 3 generacije jabučnog savijača te se jabučni savijač može pojaviti tik pred samu berbu i pokvariti nam urod. Ovakav sustav može nam pomoći da takvu štetu pravovremeno spriječimo, kazao je izv. prof. dr. sc. Goran Fruk s Agronomskog fakulteta u Zagrebu.


Korištenje AgriArt rješenja promijeniti će pogled na svakodnevne poljoprivredne aktivnosti, smanjiti gubitke i povećati urod i kvalitetu plodova u poljoprivredi te urod i kvalitetu plodova unutar industrijskog voćnjaka.
Rješenja koja nudi AgriArt projekt baziraju se na automatiziranom prikupljanju različitih podataka (podataka s meteo postaja, foto uzoraka s lovki, foto uzoraka s fiksnih kamera te s rovera/robota koji autonomno obilazi voćnjak) i njihovoj obradi kroz sustav baziran na strojnom učenju što omogućava rano prepoznavanje i alarmiranje različitih agronomskih pojava i štetnika unutar industrijskog voćnjaka. Zahvaljujući automatiziranom sustavu, agronomi/stručnjaci moći će davati mišljenje o nekom problemu u voćnjaku bez njihova fizička prisustva na lokaciji.






{kind=link}